

Better driving by design: Purdue-Led NSF CHORUS Center makes autonomous systems stay safe
There were more than 1,000 crashes involving vehicles equipped with automated driving systems or Level 2 advanced driver assistance systems in the first half of 2025, according to the National Highway Traffic Safety Administration. Whether on highways or farms, automated systems must remain safe despite sensor failures, GPS disruptions, network dropouts or even cyber-attacks.
That’s why Purdue University is leading CHORUS, a multi-institution research center funded by a $7 million National Science Foundation (NSF) grant, to build resilience into cyber-physical systems (CPS). The name is inspired by the Egyptian god Horus, who symbolizes protection from disasters, with the “C” added to emphasize the center’s cyber focus.
“With CHORUS, we want to give cities and transportation agencies a scientific way to reason about how their cyber-physical systems behave under stress from cyberattacks, equipment failures, or simple human error,” said Saurabh Bagchi, CHORUS director and professor of electrical and computer engineering at Purdue’s Elmore Family School of Electrical and Computer Engineering (ECE) in the College of Engineering (COE).
“Our goal is for CHORUS to help multiple stakeholders coordinate their defenses, so connected and autonomous transportation can remain safe and reliable when such perturbations are inevitable.”
 Purdue CHORUS PIs (left to right: Dan Delaurentis, Purdue VP for Research; Saurabh Bagchi; Somali Chaterji, Tim Cason and Shreyas Sundaram) were recognized at the Purdue Seed for Success program, which honors recipients of sponsored grants equal to or greater than $1 million.
Purdue CHORUS PIs (left to right: Dan Delaurentis, Purdue VP for Research; Saurabh Bagchi; Somali Chaterji, Tim Cason and Shreyas Sundaram) were recognized at the Purdue Seed for Success program, which honors recipients of sponsored grants equal to or greater than $1 million. CHORUS addresses a fundamental challenge: building dependable connected and autonomous transportation systems (CATS) when every component, including hardware, software, communication links and human operators, is inherently imperfect. The guiding principle is simple: systems must remain safe when, not if, failures occur.
The center organizes its research into three thrusts. First, it models systems and stakeholders to reveal how failures originate and propagate. Second, it applies game theory and optimization for proactive planning that guides cost effective resilience investments. Third, it develops runtime detection and distributed response so systems can maintain safety and availability as conditions change.
“CHORUS aims to substantially reduce crashes and severe incident in connected and autonomous transportation by making these systems more resilient to failures, cyberattacks, and other disruptions,” said Somali Chaterji, CHORUS evaluation lead and associate professor of agricultural and biological engineering (ABE) in Purdue’s College of Agriculture and COE, who also holds a courtesy appointment in the Elmore Family School of Electrical and Computer Engineering.
Purdue leads the center with major academic partners from the University of Southern California (USC), Georgia Tech, and the University of Wisconsin–Madison. The investigators from Purdue are Bagchi, Shreyas Sundaram, Carla Zoltowski and Aravind Machiry from ECE; Somali Chaterji from ABE and ECE; and Tim Cason from the Mitch Daniels School of Business.
Industry and government collaborators bring expertise from multiple sectors. A drive-by-wire testbed at USC allows researchers to validate CHORUS algorithms in real-world conditions, not just in simulations.
Chaterji, the CHORUS evaluation lead, leads research that directly reinforces the project’s resilience goals. Her lab, the Innovatory for Cells and Neural Machines (ICAN), focuses on one of the most pressing constraints in automation: compute and energy efficiency.
“My lab focuses on rightsizing computation, that is, matching models and hardware to the task instead of always defaulting to the largest model,” she explained. “We show that you can train strong perception models for autonomous systems from limited, noisy data while staying within tight energy and latency budgets. That same resource-aware mindset is central to CHORUS, where we aim to make large-scale CPS safer without dramatically increasing compute or energy demands.”
In 2025, multiple CHORUS-focused papers from Chaterji’s lab were published, including AGILE3D and SWSeg. AGILE3D, published at ACM MobiSys 2025 (the International Conference on Mobile Systems, Applications, and Services), a top venue for mobile and embedded systems research, improves 3D perception in noisy or computationally constrained environments.
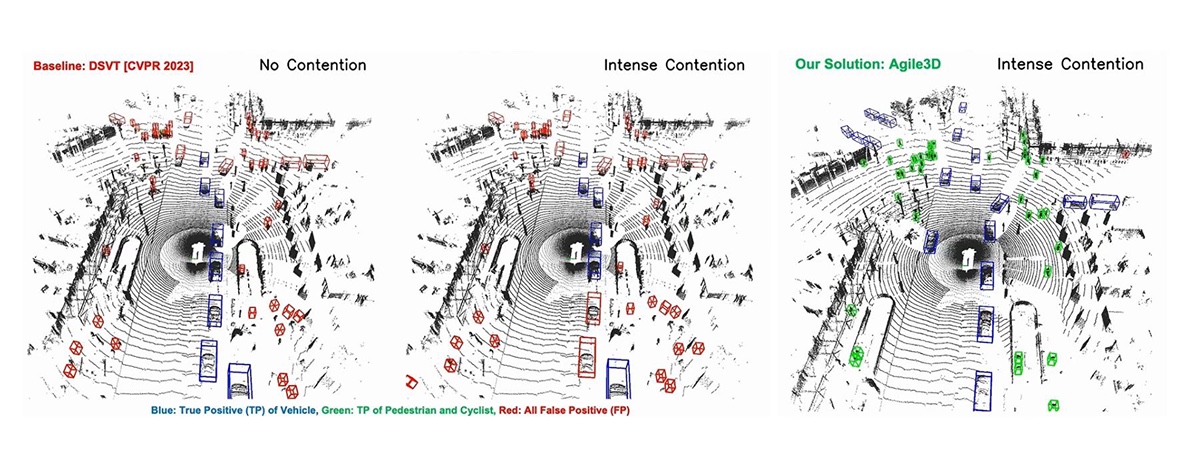 When onboard computers are busy, many advanced perception systems start “hallucinating” obstacles, shown here as red boxes in the left and center panels. AGILE3D (right) adapts in real time to hardware load and scene complexity, preserving accurate detection of vehicles and pedestrians (blue and green boxes), even under intense resource contention. The same ability to keep perception stable under shared compute loads also applies to off-road autonomy, including farm tractors and harvesters, forestry machines, and inspection or mapping drones that run perception, navigation and control simultaneously on constrained onboard GPUs.
When onboard computers are busy, many advanced perception systems start “hallucinating” obstacles, shown here as red boxes in the left and center panels. AGILE3D (right) adapts in real time to hardware load and scene complexity, preserving accurate detection of vehicles and pedestrians (blue and green boxes), even under intense resource contention. The same ability to keep perception stable under shared compute loads also applies to off-road autonomy, including farm tractors and harvesters, forestry machines, and inspection or mapping drones that run perception, navigation and control simultaneously on constrained onboard GPUs.
AGILE3D, currently patent pending, adapts processing intensity based on real-time conditions, allowing connected and autonomous systems to interpret complex LiDAR data quickly enough to respond safely even when onboard computing resources are under load. The approach also directly supports off-road autonomy in digital agriculture and forestry, where dust, crop canopy and uneven terrain can degrade sensor performance — for example, when an autonomous tractor drives through a dusty harvest row or when an inspection or mapping drone flies near tree lines and farm structures, both while detecting people, vehicles and obstacles in real time.
 Compared with other segmentation models (three center masks), SWSeg (far right) more sharply separates the rider and horse from the background, capturing fine details and cleaner object boundaries even in ambiguous regions.
Compared with other segmentation models (three center masks), SWSeg (far right) more sharply separates the rider and horse from the background, capturing fine details and cleaner object boundaries even in ambiguous regions. SWSeg, published at the IEEE/CVF Computer Vision and Pattern Recognition (CVPR) Conference 2025, is patent-pending and open-sourced. The semi-supervised model produces clearer object boundaries and more consistent segmentation across diverse environments to improve scene understanding when labeled training data is limited. For digital agriculture and forestry, this can support reliable segmentation across varying crops, soil types and weather conditions without requiring large curated datasets.
The CHORUS team at Purdue has produced more than 20 research publications this year. That includes AdaLLaVA, an open-source paper Chaterji’s group wrote in collaboration with Yin Li at the University of Wisconsin–Madison, published at the International Conference on Computer Vision (ICCV) 2025.
“AdaLLaVA delivers fast answers on everyday hardware while preserving accuracy,” explained Li. “That same philosophy is at the heart of CHORUS as it aims to make connected and autonomous transportation safer and more dependable.”
Chaterji’s group partnered with Adobe Research on SKALD, also published at ICCV 2025, which assembles coherent multi-shot videos from candidate clips with minimal reliance on text. For CHORUS, SKALD-style video assembly can help agencies and operators stitch fragmented roadside, dashcam, or drone footage into a coherent incident timeline when feeds are incomplete, network links are unreliable, or metadata is missing, improving situational awareness and post-incident analysis.
The NSF CHORUS center enables coordinated research integrating modeling, planning, and runtime adaptation to improve resilience in safety-critical systems. Under Purdue’s leadership, the consortium has delivered patented methods, adaptive perception technologies and open-source tools that strengthen sensing and decision-making under real-world conditions.
“Advances in AI, including semi-supervised and low-label learning for computer vision, are enabling connected and autonomous systems to analyze complex environments with limited labeled data,” said Nathan Sturdevant, P.E., Emerging Mobility Director at the Indiana Department of Transportation (INDOT). “I am particularly excited to partner with Professor Chaterji and her colleagues to explore how AI models developed through the CHORUS center can further enhance perception and decision-making in autonomous transportation, enabling systems that are resilient to unexpected changes and edge-case scenarios.”
Whether on city streets or in farm fields, Purdue researchers are advancing the safety and reliability of autonomous systems. As reliance on automation grows, CHORUS innovations offer practical, scientifically grounded solutions for operating safely in unpredictable environments.
Featured Stories

By learning how to cut through the hype and focus on what truly matters, you can shop smarter...

Channing Arndt, research professor in agricultural economics and director of the Global Trade...

Daniel Szymanski and his former postdoctoral scholar Youngwoo Lee, lead author on their paper...

The Costa Rica Rainforest Experience study abroad trip allowed students to experience the wonders...

Trask is writing a new narrative about rats, birds and people as he pursues his doctorate in...

Several Forestry and Natural Resources students, staff and recent alumni have been recognized for...